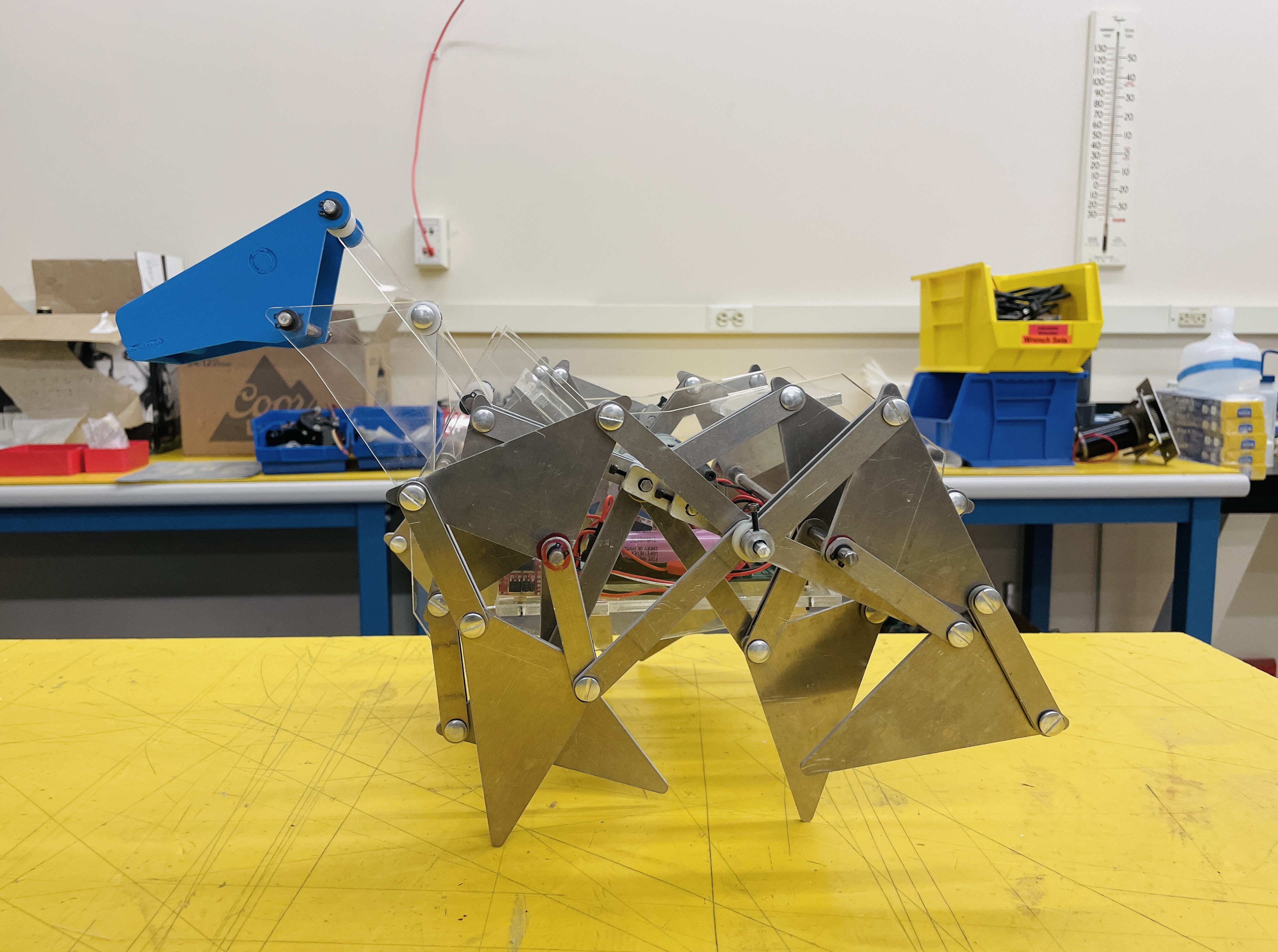
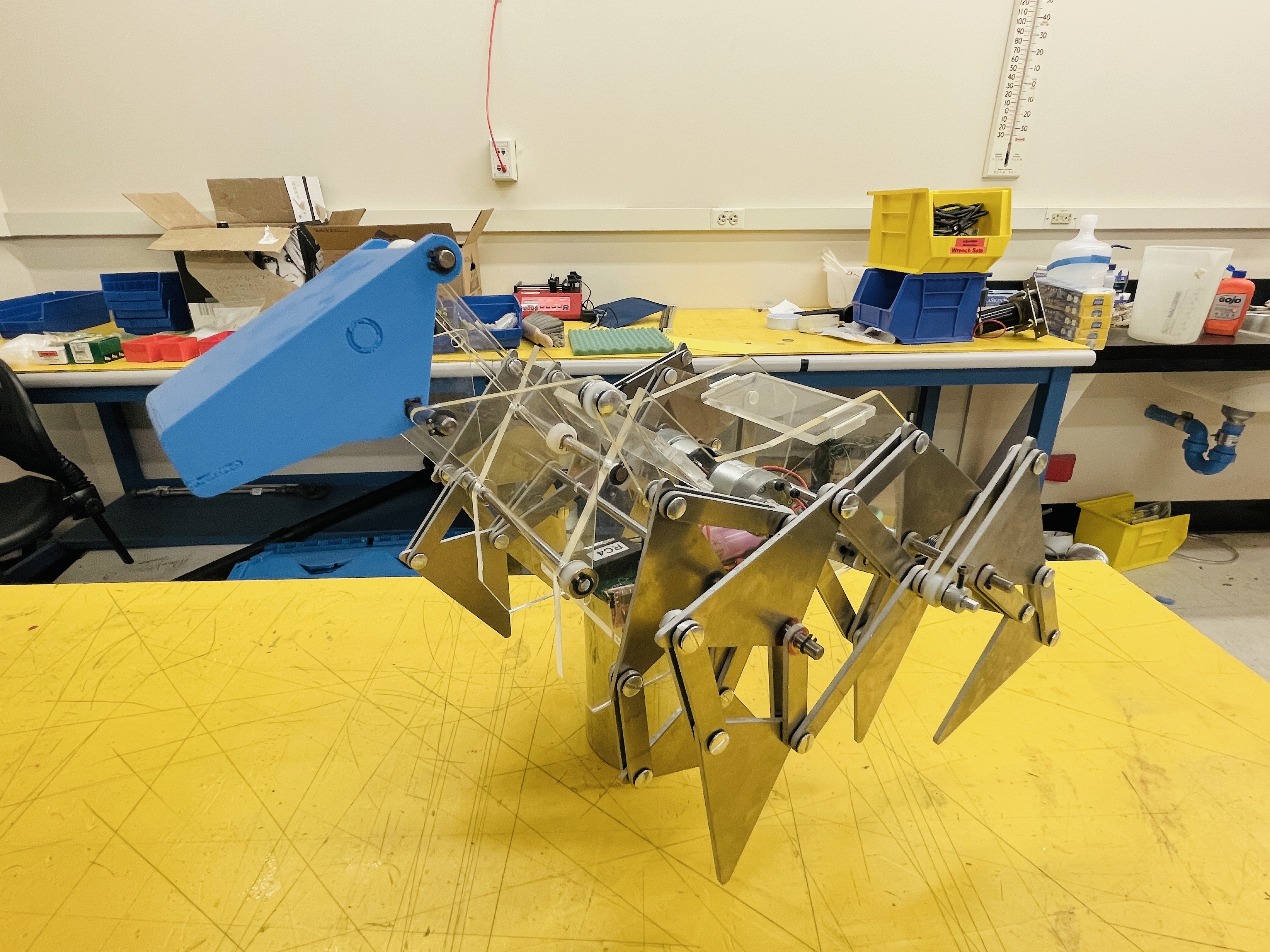
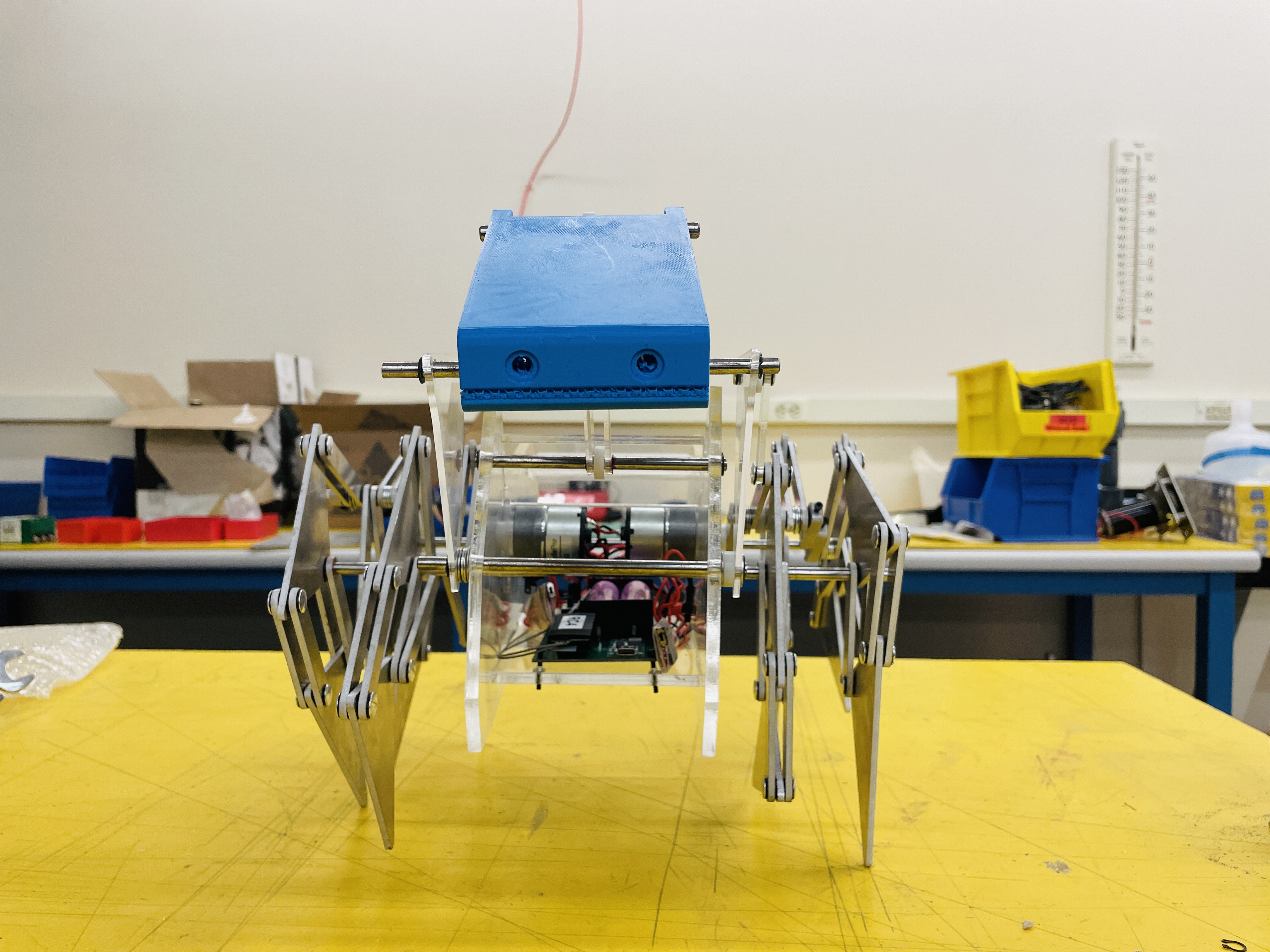
Have you ever wondered what a mechanical monster might look like? For this project, we were given the task of creating a walking “mechanical monster”, integrating 8-bar Theo Jansen linkages for the legs. These linkages were originally developed by Theo Jansen for the legs of his wind-powered mobiles. We were provided with a circuit board, two brushless DC motors, and a remote control for motor operation.